|
I'm a recent Ph.D. graduate in Computer Science from George Mason University (2023). Under the mentorship of Prof. Jana Kosecka and collaborations with Prof. Gregory J. Stein, my research focused on visual navigation in indoor scenes and out-of-distribution object detection. Notable experiences include a 2020 internship at HondaRI, US, working on 3D object detection with stereo, and a stint at AFRL MMOI dealing with aerial images. My journey began with a B.E. in Software Engineering from East China Normal University in 2014, laying the groundwork for a career blending academia with real-world problem-solving. Passionate about applying cutting-edge tech to solve challenges, I bring a diverse skill set to the dynamic field of software engineering. Email / Google Scholar / GitHub / LinkedIn / Semantic Scholar |

|
|
I'm interested in computer vision, robotics and deep reinforcement learning. My research is about visual navigation. |
|
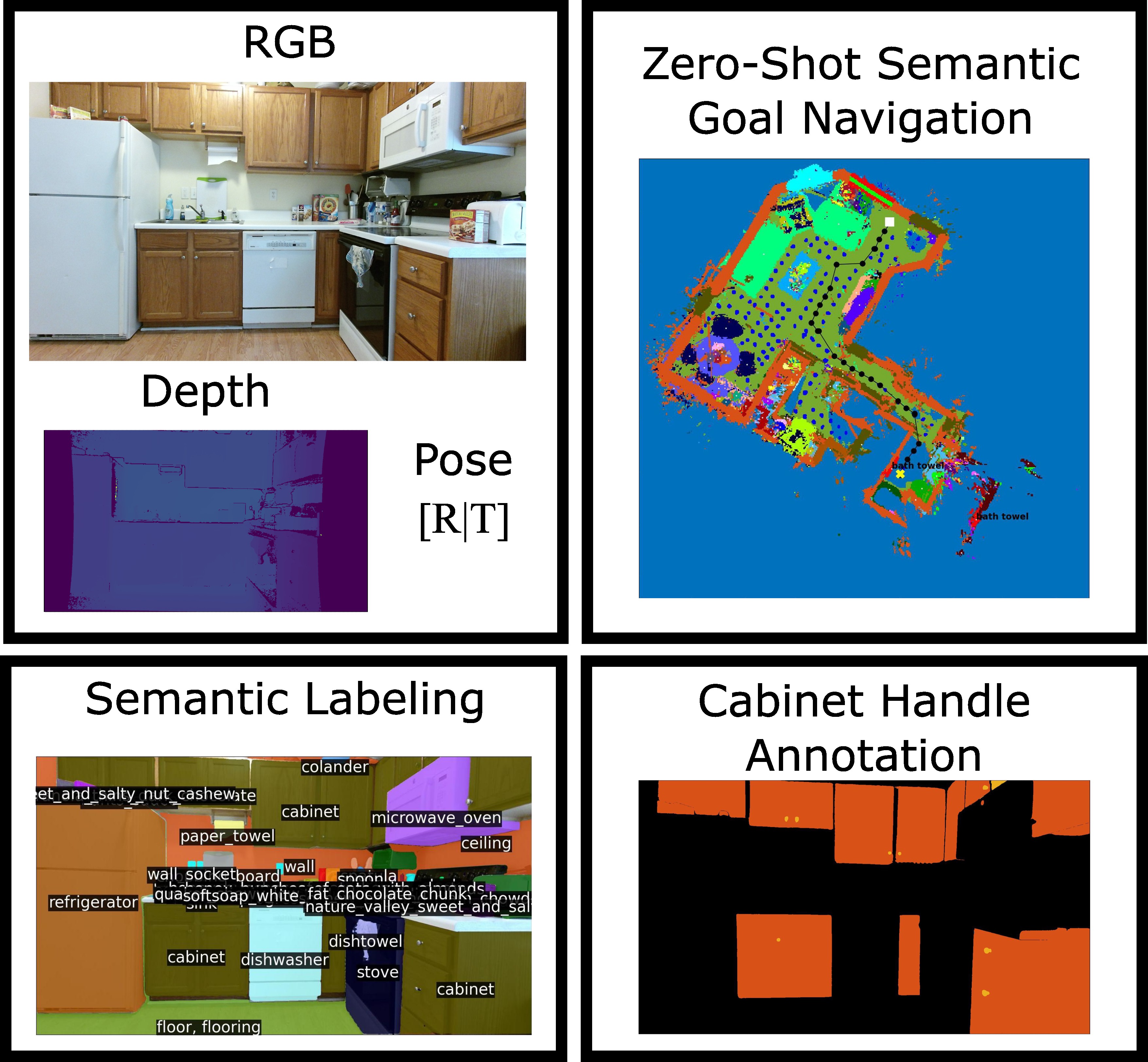
Yimeng Li*, Navid Rajabi*, Sulabh Shrestha, Md Alimoor Reza, Jana Kosecka WACV 2024 2nd Workshop on Pretraining Project Page / Code / Starting from an RGB-D dataset, we propose a labeling approach for semantic segmentation annotations. |
|
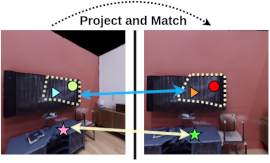
Sulabh Shrestha, Yimeng Li, Jana Kosecka WACV 2024 2nd Workshop on Pretraining We propose a method for self-supervised pre-training of a semantic segmentation model, exploiting the ability of the agent to move and register multiple views in the novel environment. |

|
Yimeng Li, Arnab Debnath, Gregory Stein, Jana Kosecka IROS, 2023 Project Page / Presentation / Slides / Poster / Code / We consider the problem of time-limited robotic exploration in previously unseen environments. Considering the situation, the agent should go to the spot to extinguish fire if a fire alarm rings and the agent should have time to explore the environment in detail if its job is to build a map of the environment. |
|
Yimeng Li, Arnab Debnath, Gregory Stein, Jana Kosecka CoRL 2022 LHP Workshop Project Page / Presentation / Slides / Code / We compare LSP-UNet (a model-based approach) against an optimistic planner, ANS and DD-PPO on Matterport3D dataset using the Habitat Simulator. |
|
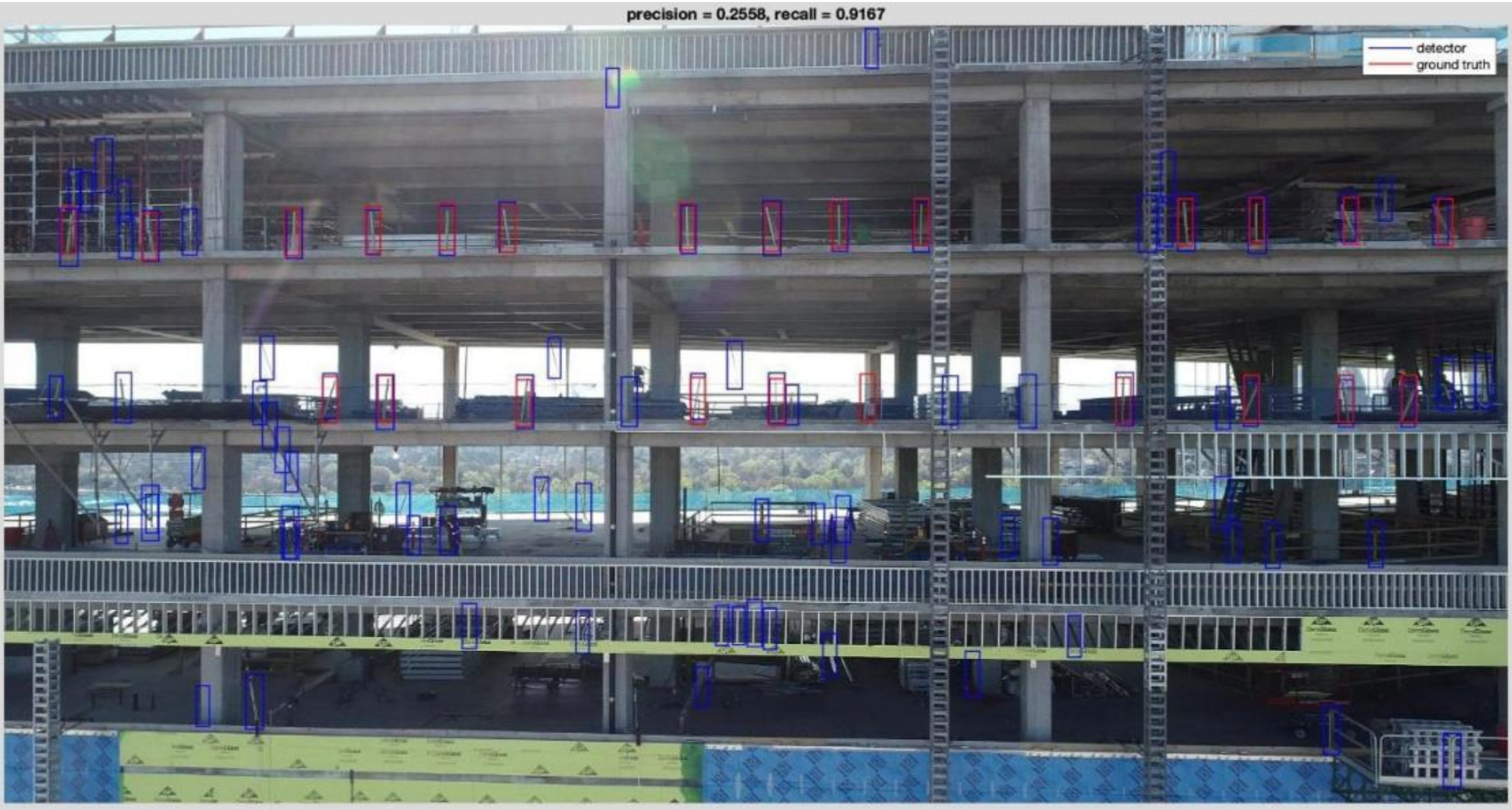
Yimeng Li, Behzad Esmaeili, Masoud Gheisari, Jana Kosecka, Abbas Rashidi arXiv:2209.13137 This study develops a framework for using unmanned aerial systems (UASs) to monitor fall hazard prevention systems near unprotected edges and openings in high-rise buildings. |
|
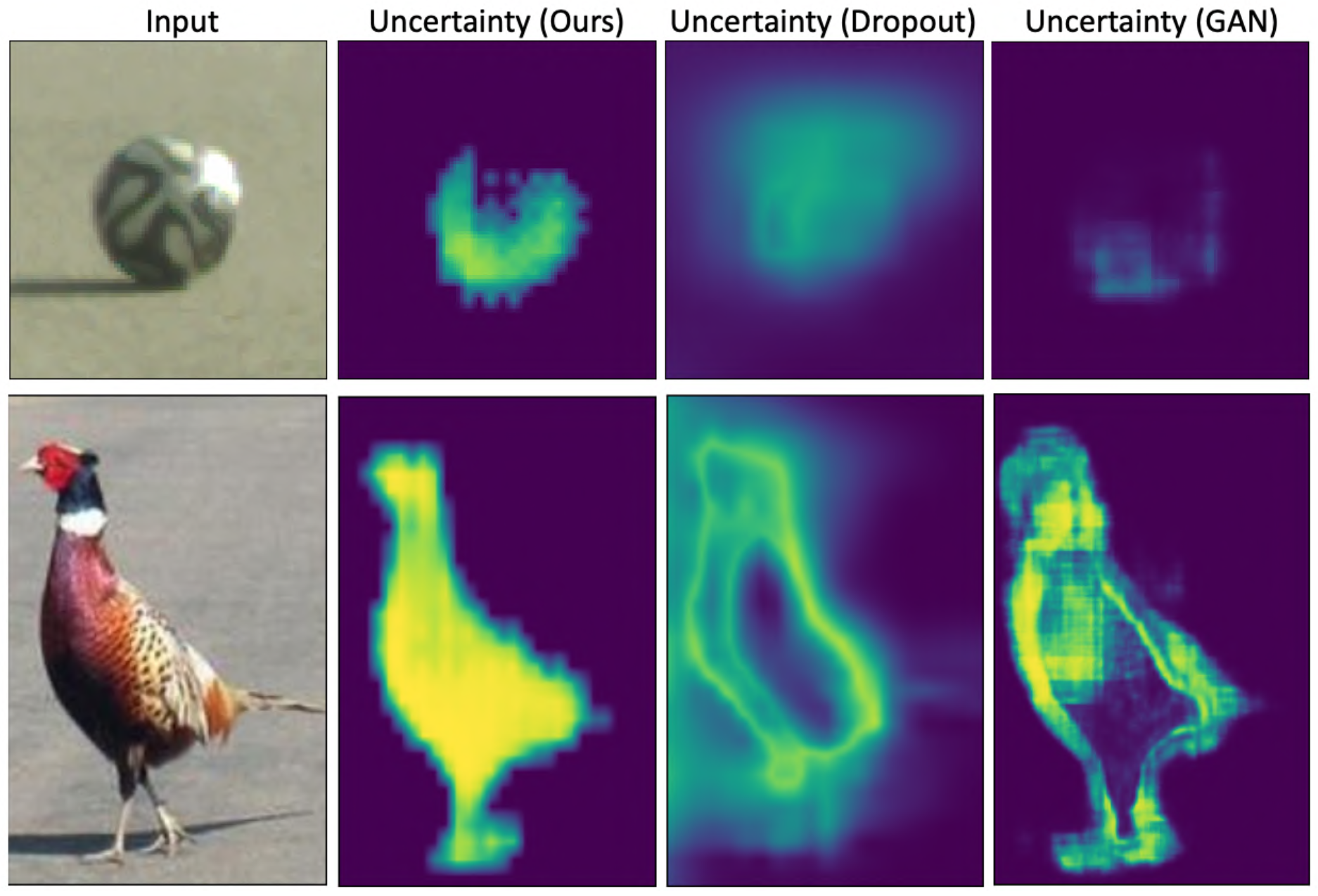
Yimeng Li, Jana Kosecka WACV, 2022 Slides Detect unknown out-of-dist objects from outdoor scenes. We adapt distance aware uncertainty estimation of semantic segmentation using Radial Basis Functions Networks (RBFN) for class agnostic object mask prediction. |
|
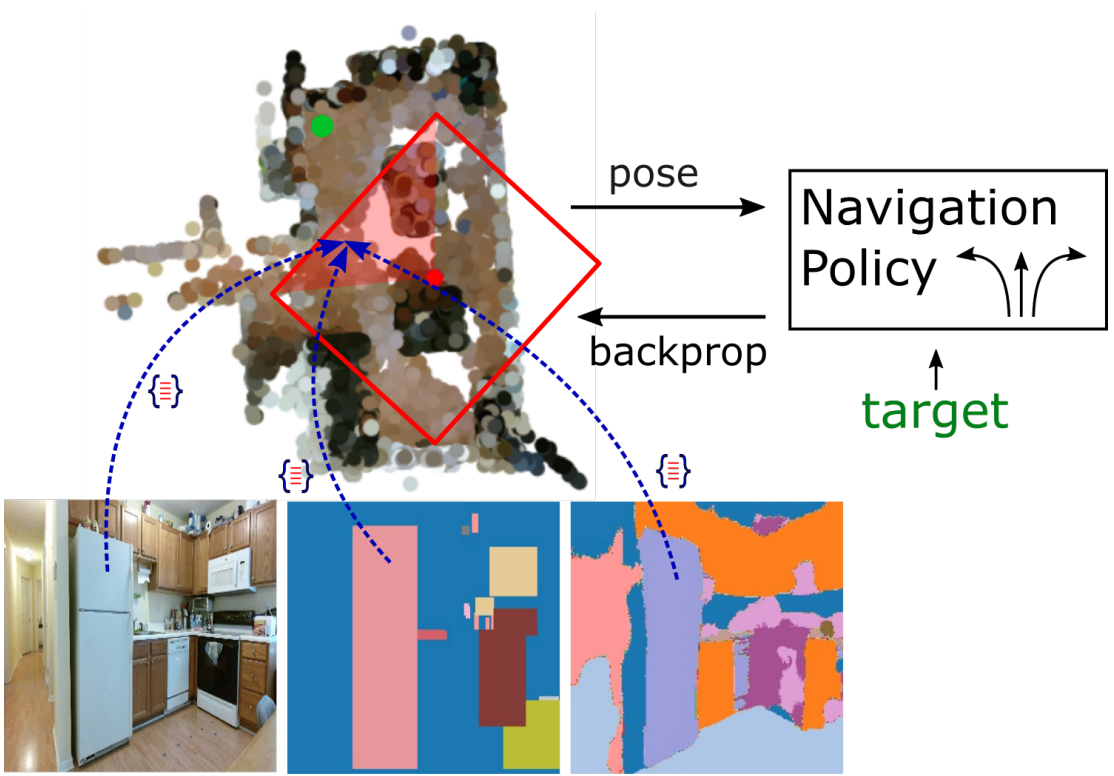
Georgios Georgakis, Yimeng Li, Jana Kosecka arXiv:1911.07980 Video This work presents a modular architecture for simultaneous mapping and target driven navigation in indoors environments. |
|
Yimeng Li, Jana Kosecka ICRA, 2020 Project Page / Video / Presentation / Slides / Code Given an initial view and the goal view or an image of the target, we learn viewpoint invariant and target invariant visual servoing for mobile robot navigation. |
|
Yep it's another Jon Barron website. |